SIKO participe à un projet de robotisation de la cueillette dans les vergers


L’AurOrA (« Autonomer Obstplantagenhelfer Altes Land ») est un petit véhicule à conduite automatique qui se déplacera de manière autonome dans les vergers, capable d’identifier les caisses de fruits remplies, puis de les saisir pour les transporter à l’endroit convenu. Ce robot apportera une aide aux cueilleurs, leur permettant de se consacrer à des tâches plus exigeantes. Grâce à la technique et à l’automatisation, il sera possible de réduire de plus en plus le nombre de tâches monotones et fatigantes, facilitant ainsi considérablement le travail des arboriculteurs.
L’idée de ce projet a été inspirée de la pratique : Johann Schröder, arboriculteur à Jork, dans l’Altes Land au sud-ouest de Hambourg, a fait appel à l’aide de la Hochschule 21, Université de sciences appliquées de Buxtehude, pour développer un tel véhicule automatisé. En collaboration avec PWH, fabricant de machines agricoles à Jork, le projet a été lancé en février 2020. Le besoin d’assistance technique est élevé chez les propriétaires de vergers et le projet devrait donc devenir un produit commercialisable et rentable à moyen terme. L’objectif réel du projet est toutefois de réaliser d’abord un prototype fonctionnel d’ici janvier 2023 afin de démontrer la faisabilité technique. Le projet est financé par le programme d’aide ZIM du Ministère fédéral de l’Économie.
Deuxième étape majeure : automatisation de la conduite du véhicule
Après avoir réussi la deuxième étape, la réalisation se trouve désormais dans le dernier tiers du projet : le robot peut déjà fonctionner de manière largement autonome dans le verger. Il est encore tenté d’améliorer la prévention des collisions et la reconnaissance du sol, par exemple quand il est boueux, afin d’éviter que les roues ne patinent et que le véhicule ne s’enlise ou ne glisse dans un fossé. La troisième étape majeure sera l’automatisation du chargement et du transport des caisses.
Un tel projet de développement comporte toujours des défis particuliers, à commencer par la coordination des intérêts entre diverses exploitations fruitières qui ont souvent des processus de récolte très différents, en passant par des problèmes d’infrastructure tels qu’un standard de téléphonie mobile stable, afin que le robot puisse recevoir des données GPS et également communiquer avec l’opérateur, et jusqu’aux aléas de l’exploitation quotidienne en plein air (intempéries, neige, pluie, soleil, nature du sol).
Nous avons été agréablement surpris par la volonté de SIKO de promouvoir des projets d’avenir et par son engagement pour nous conseiller. Nous n’avions en effet au début pas d’idées très précises concernant les capteurs dont nous avions besoin. Tout cela s’est précisé en travaillant ensemble.
Alexander Kammann M. Sc., collaborateur scientifique à la Hochschule 21


SIKO soutient les projets prometteurs
Des capteurs sont nécessaires à la réalisation de diverses mesures pour qu’un véhicule puisse fonctionner de manière autonome. Spécialiste de la mesure et des capteurs, SIKO a été sollicité pour la mesure de l’angle de braquage et de la position des instruments de saisie des caisses. Forte d’une longue expérience dans le domaine des engins mobiles et de la technique des machines agricoles, la société SIKO a pu apporter son expertise lors de la phase de planification et à fourni pour finir deux types de capteurs rotatifs adaptés qui supportent ces fonctions importantes.
Alexander Kammann, chercheur à la Hochschule 21, apprécie l’engagement des experts de SIKO : « Nous avons été agréablement surpris par la volonté de SIKO de promouvoir des projets d’avenir et par son engagement pour nous conseiller. Nous n’avions en effet au début pas d’idées très précises concernant les capteurs dont nous avions besoin. Tout cela s’est précisé en travaillant ensemble ».
Des capteurs rotatifs robustes pour des conditions environnementales difficiles
En premier lieu, il fallait que les capteurs soient très robustes et insensibles aux rudes conditions extérieures (boue, poussière, pluie, fort rayonnement solaire, irrégularités du sol). Or, les composants du système modulaire de capteurs PURE.MOBILE de SIKO sont particulièrement adaptés à une utilisation dans des machines mobiles dans des conditions environnementales défavorables.
La partie arrière du véhicule est équipée d’une double roue orientable, capable ainsi d’assurer la direction. L’angle de braquage est enregistré par le capteur rotatif magnétique WV5800M, traité et envoyé à la direction du véhicule. Il s’agit d’un capteur multitours qui permet de saisir plusieurs rotations de manière absolue. Même si l’alimentation électrique vient à être interrompue, par exemple parce que les batteries sont vides, l’angle de braquage précédemment réglé reste toujours disponible. Sans capteur absolu, l’angle de braquage serait identifié à tort comme un angle de zéro degré lors du redémarrage du véhicule. Le principe de mesure magnétique répond aux exigences de robustesse et d’insensibilité. L’équipe du projet a également été convaincue par la grande précision et la fiabilité du capteur rotatif, permettant au véhicule de toujours adopter l’angle de braquage nécessaire à la trajectoire calculée, sans défaillances ni déviations trop importantes.
Afin de prévenir toute panne et d’augmenter encore la sécurité, y compris dans l’interaction avec les personnes travaillant dans le verger, il est prévu d’équiper les véhicules futurs avec la version Safety du capteur rotatif, WV58MR, offrant la détection de position redondante. Lors de la phase de développement, l’accent a d’abord été mis sur la faisabilité technique si bien que le capteur rotatif sans Safety-Standard était suffisant. Le plus des modèles SIKO : les deux capteurs étant de construction identique, il n’est pas nécessaire de procéder à des modifications physiques de l’application en cas de remplacement. Une interface CANopen était également souhaitée pour la détection de l’angle de braquage afin de pouvoir utiliser le plus grand nombre possible de composants électroniques standardisés, rapidement interchangeables et intégrables dans le bus.


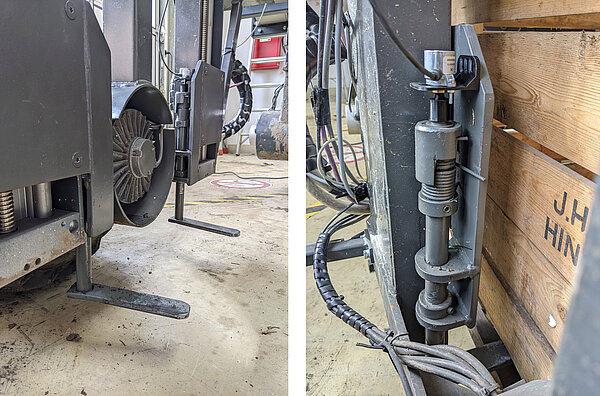
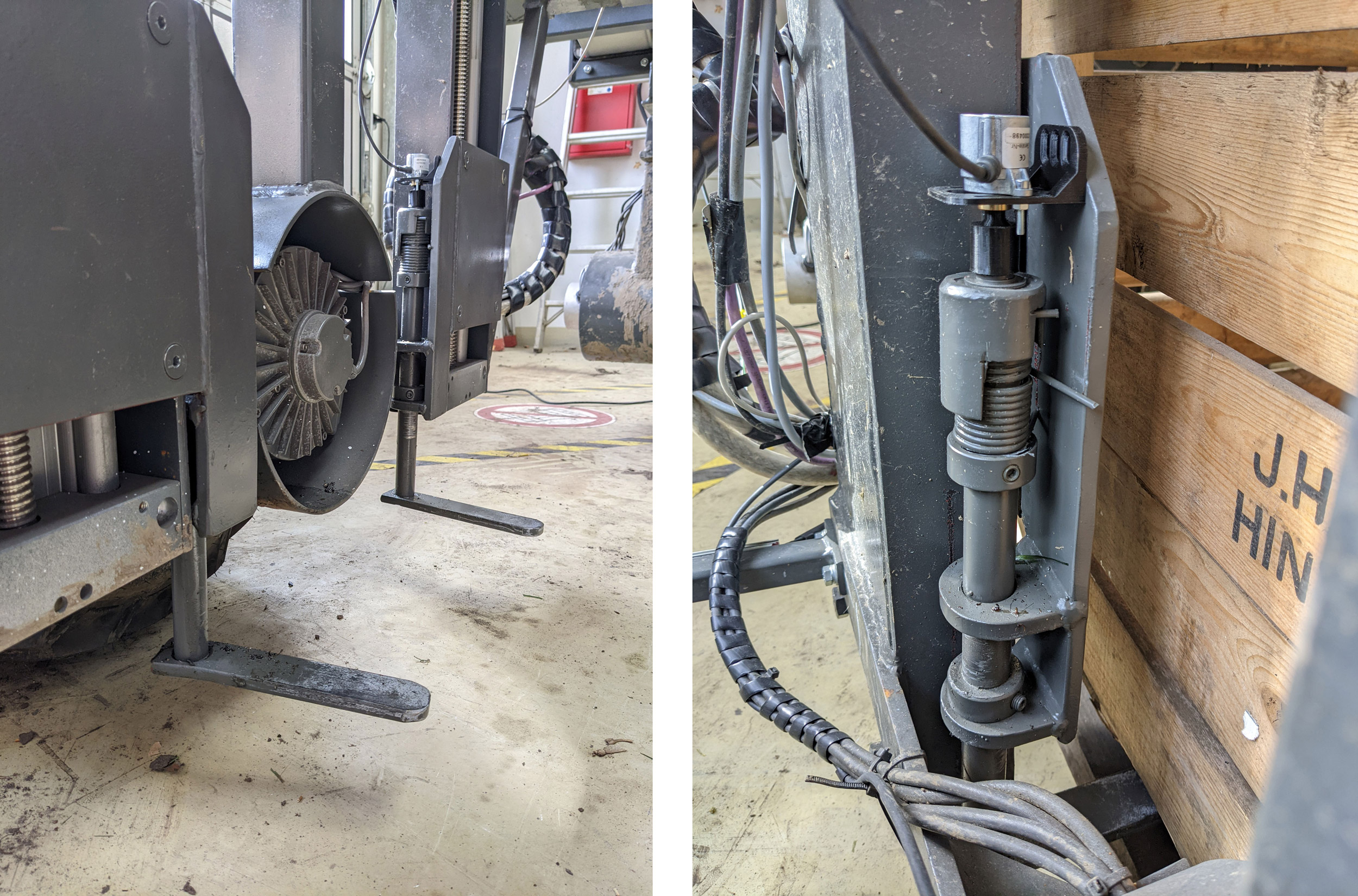
Capteurs de position pour les « flippers »
Le deuxième capteur rotatif SIKO AH25S est encore plus petit et plus compact, mais tout aussi robuste. Il s’agit d’un capteur monotour qui surveille la position des instruments de saisie des caisses, appelés « flippers ». La caisse de fruits remplie est saisie en quatre points, chacun par un flipper. Lorsque le robot passe au-dessus de la caisse et que celle-ci touche les flippers à ressort, ces derniers pivotent sur le côté, puis se déplient automatiquement pour se retrouver sous les quatre coins de la caisse pour la saisir. La position de chaque flipper doit être connue pour que les caisses puissent être transportées en toute sécurité : ont-ils bien basculé en arrière ou bien se sont-ils peut-être bloqués ? Les quatre flippers se trouvent-ils en dessous de la caisse pour pouvoir assurer sa saisie ? L’espace de montage étant ici très limité, il fallait un capteur en version miniature qui puisse être intégré directement, sans support spécial pour la fixation. Un capteur analogique est ici suffisant, car la précision nécessaire pour la mesure est plus faible que celle du capteur d’angle de braquage.


Un robot de cueillette offrant une véritable valeur ajoutée
De nombreux petits rouages se doivent de bien fonctionner dans un tel projet de développement afin de transformer une vague idée en un produit techniquement irréprochable dont l’utilisation pourra être étendue à de nombreux vergers, avec un rapport coûts/bénéfices équilibré. Afin d’offrir un réel bénéfice aux entreprises, il est prévu d’utiliser l’AurOrA pour d’autres travaux d’entretien tels que le paillage et le fauchage ou encore comme aide à la plantation de nouveaux arbres. Ainsi, une rentabilisation efficace est possible presque tout au long de l’année, sans se limiter à la seule période de récolte.
Autrice : Michaela Wassenberg, journaliste freelance
Nombre de caractères: env. 7 420


